
2020.01.07 更新
萬眾矚目的感測器終於到拉~

趕緊來實測下,到底還會不會飄移呢?
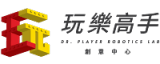
更新完VEXCode,打開Inertial Example,直接灌進去
執行結果如下,根據我們實際測試,飄移現象確實解決了,而且具有更多的讀數,
包含角速度等等,所以可以做測程也說不定。
你說我怎麼截EDR的圖的?私訊小邊就教你哦~
哪裡買,趕快聯繫我們粉絲專業吧~
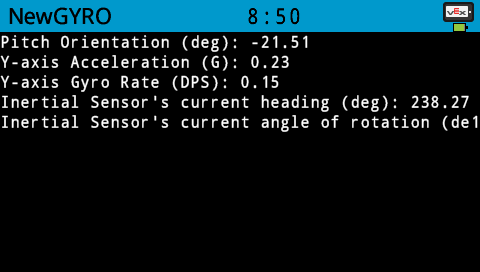
VEX EDR V5 最近推出了一顆慣性感測器,是3軸(X,Y和Z)加速度計和3軸陀螺儀合而為一的一顆新Sensor,加速度計測量機器人的線性加速度(包括重力),而陀螺儀測量圍繞V5慣性感測器三軸的旋轉速率。
加速度計與 3軸陀螺儀合在一個感測器中的組合可實現更準確的量測,並更精細的控制機器人。
加速度計: 一個方位可以將機器人的X軸作為其向前和向後運動,將其Y軸作為其左右運動,並且將其Z軸作為其向上和向下運動(ex:機器人將自己從地面上抬起)。
陀螺儀:陀螺儀不是測量沿3軸的線性運動,而是測量繞3軸的旋轉運動。 當內部電子設備創建固定參考點時,傳感器會測量此旋轉。 當傳感器旋轉離開此參考點時,它會改變輸出信號。
使用這顆新感測器前,必須更新到最新版的VEXCode哦~這顆感測器在程式運行初始化階段( vexcodeinit() ),進行快速校正,相較於V5主機內建的gyro還要來的精準喔~